Observação
Este módulo está disponível apenas na versão privada do GeoSlicer. Saiba mais clicando aqui.
Excentricidade (Eccentricity)
Motivação
Perfis de imagem ultrassônica podem sofrer de excentricidade, que ocorre quando a ferramenta não está centralizada no poço. Isso pode causar artefatos na imagem de amplitude, onde um lado do poço parece ter uma amplitude sistematicamente menor do que o outro. O módulo de Excentricidade corrige esses artefatos usando o tempo de trânsito para compensar as variações de amplitude.
Teoria
O método de correção é baseado na patente US2017/0082767, que modela a atenuação da amplitude com a distância (relacionada ao tempo de trânsito) usando um decaimento exponencial. O parâmetro chave neste modelo é o "Tau".
A correção é aplicada ponto a ponto na imagem. O valor ideal de "Tau" é aquele que produz uma imagem corrigida com certas características estatísticas desejadas. O módulo pode otimizar "Tau" minimizando um ou mais dos seguintes momentos estatísticos da distribuição de amplitudes da imagem corrigida:
- Desvio Padrão (Standard Deviation): Busca a menor variação de amplitude na imagem.
- Assimetria (Skewness): Busca uma distribuição de amplitude o mais simétrica possível.
- Curtose (Kurtosis): Busca uma distribuição de amplitude com "caudas" semelhantes a uma distribuição normal.
Como Usar
 |
|---|
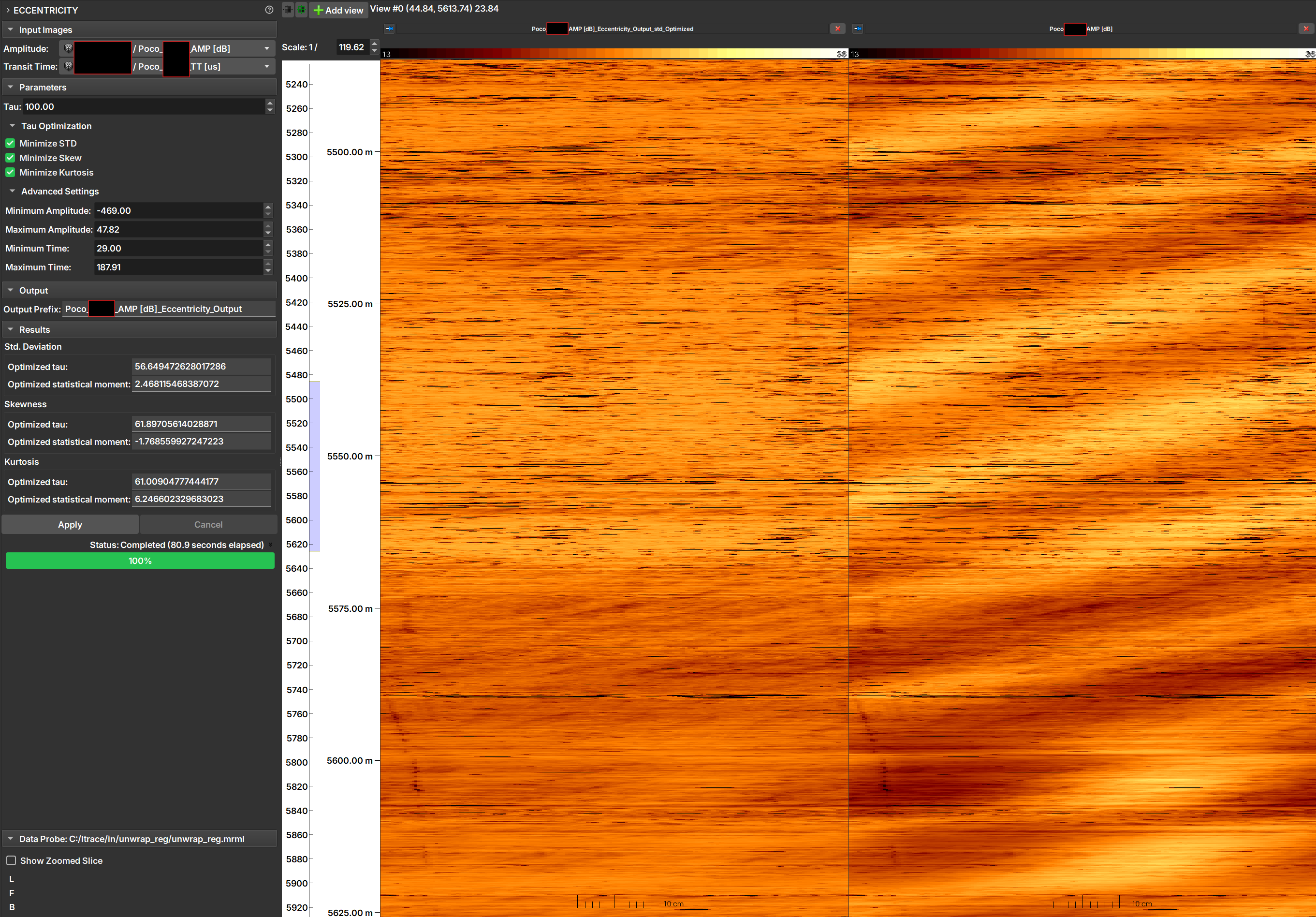
| Figura 1: Interface do módulo Eccentricity, resultado, e imagem original. |
Imagens de Entrada (Input Images)
- Amplitude: Selecione a imagem de amplitude a ser corrigida.
- Tempo de Trânsito (Transit Time): Selecione a imagem de tempo de trânsito correspondente.
Parâmetros (Parameters)
- Tau: Insira um valor de "Tau" para ser usado na correção. Este valor só é utilizado se nenhuma das opções de otimização abaixo for selecionada.
-
Otimização de Tau (Tau Optimization):
- Minimizar Desvio Padrão (Minimize STD): Marque esta opção para que o módulo encontre o "Tau" que minimiza o desvio padrão da imagem corrigida.
- Minimizar Assimetria (Minimize Skew): Marque para encontrar o "Tau" que minimiza a assimetria (absoluta) da imagem corrigida.
- Minimizar Curtose (Minimize Kurtosis): Marque para encontrar o "Tau" que minimiza a curtose da imagem corrigida.
Nota
É possível selecionar múltiplas opções de otimização. Neste caso, uma imagem de saída será gerada para cada opção selecionada. Se nenhuma opção for marcada, a correção será feita usando o valor de "Tau" inserido manualmente no campo Tau.
Configurações Avançadas (Advanced Settings)
Esta seção permite refinar o processo de otimização, ignorando valores de pixel que possam ser ruído ou anomalias.
- Amplitude Mínima / Máxima (Minimum / Maximum Amplitude): Define o intervalo de valores de amplitude a serem considerados no cálculo da otimização. Pixels com valores fora deste intervalo serão ignorados.
- Tempo de Trânsito Mínimo / Máximo (Minimum / Maximum Time): Define o intervalo de valores de tempo de trânsito a serem considerados no cálculo da otimização. Pixels com valores fora deste intervalo serão ignorados.
Saída (Output)
- Prefixo de Saída (Output Prefix): Digite o prefixo a ser usado no nome das imagens de saída. O nome final incluirá o tipo de otimização (ex:
_std_Optimized).
Resultados (Results)
Esta seção exibe os resultados para cada otimização realizada.
- Tau otimizado (Optimized tau): O valor de "Tau" ótimo encontrado pelo processo de otimização.
- Momento estatístico otimizado (Optimized statistical moment): O valor do momento estatístico (desvio padrão, assimetria ou curtose) correspondente ao "Tau" otimizado.
Execução
- Apply: Inicia o processo de correção.
- Cancel: Cancela a execução do processo.
Referências
- MENEZES, C.; COMPAN, A. L. M.; SURMAS, R. Method to correct eccentricity in ultrasonic image profiles. US Patent No. US2017/0082767. 23 mar. 2017.